Explorer
View robot
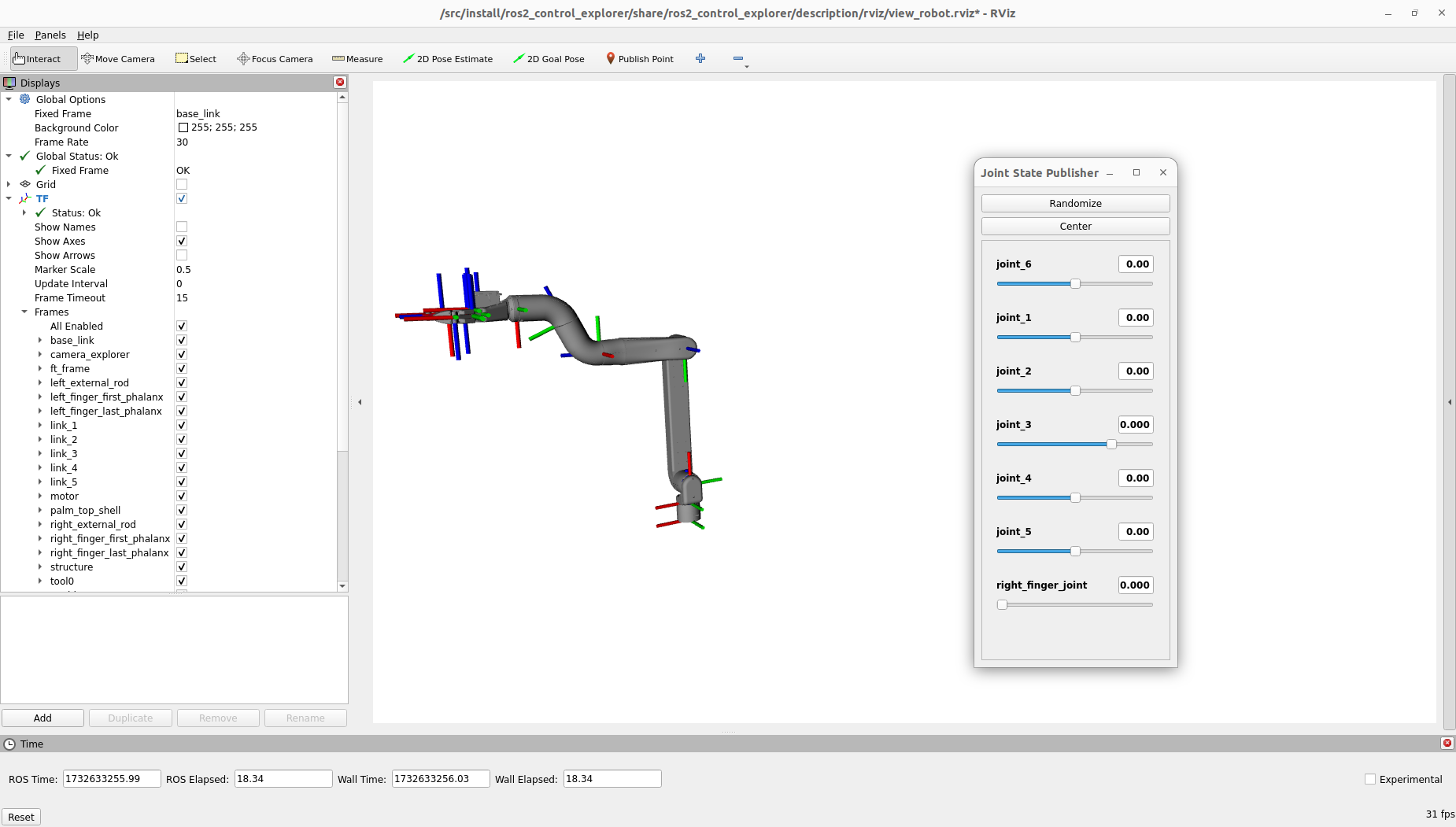
To view the robot, open a terminal and launch the view_explorer.launch.py file from the explorer_description package:
ros2 launch explorer_description view_explorer.launch.py
With the joint_state_publisher_gui you can now change the position of each joint.
Simulation using Gazebo Fortress
Joint control
To launch the simulation in Gazebo with joint control, launch the joint_control.launch.py file from the explorer_bringup package:
ros2 launch explorer_bringup joint_control.launch.py
This script launches RViz, Gazebo, the robot controller, and all necessary files to send commands to the controller.
Tip
If you don’t want to launch RVIZ and don’t show gazebo GUI, add gui:=false when launching the simulation
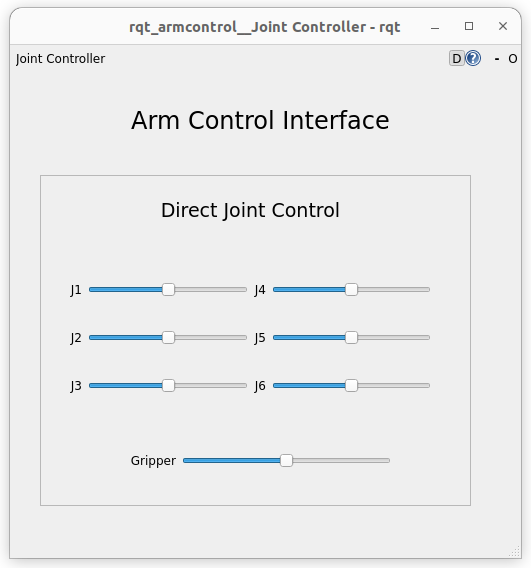
To control the robot, you can use the GUI :
or an Xbox One controller :

Cartesian control
To launch the simulation in Gazebo with cartesian control, launch the cartesian_control.launch.py file from the explorer_bringup package:
ros2 launch explorer_bringup cartesian_control.launch.py
This script launches RViz, Gazebo, the robot controller, and all necessary files to send commands to the controller.
Tip
If you don’t want to launch RVIZ and don’t show gazebo GUI, add gui:=false when launching the simulation
Tip
If you don’t a 3D mouse, add spacenav:=false when launching the simulation
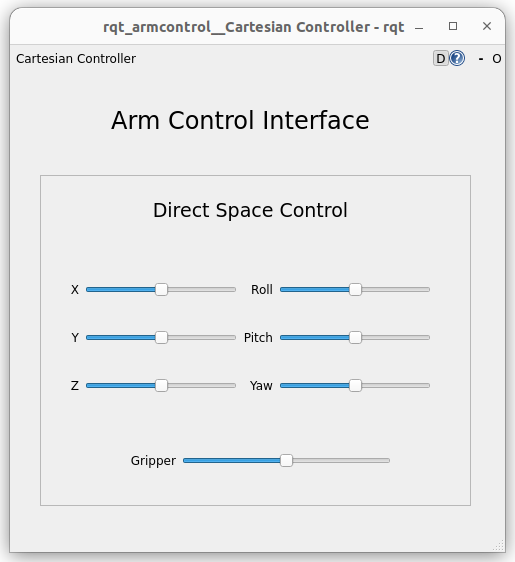
To control the robot, you can use the GUI :
or 3D mouse.
Mode 0
To launch the simulation in Gazebo with mode 0, launch the mode_0.launch.py file from the explorer_user_interfaces_cpp package:
ros2 launch explorer_user_interfaces_cpp mode_0.launch.py
This script launches RViz, Gazebo, the robot controller, and all necessary files to send commands to the controller.
Tip
If you don’t want to launch RVIZ and don’t show gazebo GUI, add gui:=false when launching the simulation
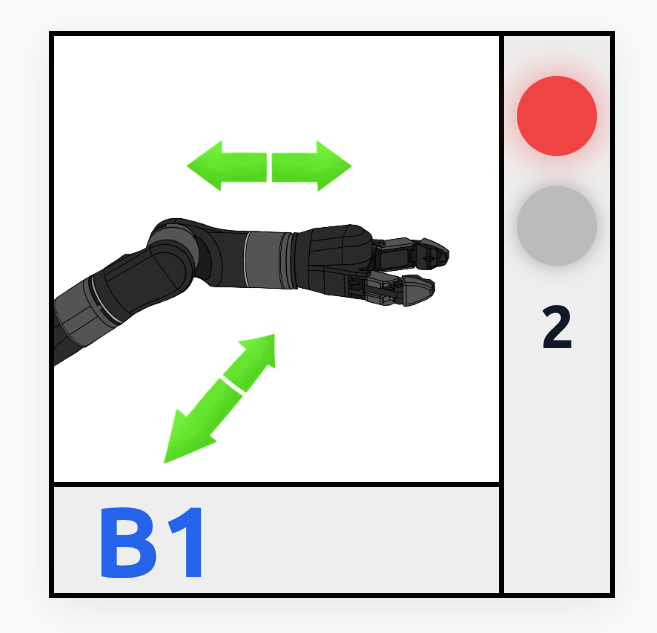
The robot can be controlled using an Xbox One controller. Movement is handled with the left joystick, while mode switching is performed using a short or long press on the A button.
To monitor the current operating mode and its associated motion mappings, open a web browser and navigate to http://0.0.0:8080.
Use the real Explorer
First use of your Explorer
If this is the first time you are using your Explorer, update the can_id parameter of each joint with the VESC CAN IDs of your robot (To find the VESC ID of your robot, see Change the CAN ID).This parameter is defined in the explorer_actuators.ros2_control.xacro file of the explorer_description package.
Additionally, use the VESC Tool to initialize the 0 position of each actuator on the robot (see: Change the position 0 of an actuator). The robot’s position 0 should look like this:
On each joint, align the pin with the mark on the actuator.
Joint control
Connect the Explorer power supply and link it to a computer using a USB cable. In the explorer directory in the host, run :
sudo ./setcan0_1M.sh
This script configures the can0 interface with a bitrate of 1 Mbps and sets the queue length to 100 packets.
In the container, launch the joint_control.launch.py file from the explorer_bringup package to start the robot controller and RVIZ.
ros2 launch explorer_bringup joint_control.launch.py simulation:=false
Tip
If you don’t want to launch RVIZ and don’t show gazebo GUI, add gui:=false when launching joint_control
To control the robot, you can use the GUI :
or an Xbox One controller :
Cartesian control
Attention
Ensure that you have properly initialized the 0 position of your robot before proceeding. If not, refer back to the section First use of your Explorer
Connect the Explorer power supply and link it to a computer using a USB cable. In the explorer directory in the host run :
sudo ./setcan0_1M.sh
This script configures the can0 interface with a bitrate of 1 Mbps and sets the queue length to 100 packets.
In the container, launch the cartesian_control.launch.py file from the explorer_bringup package to start the robot controller and RVIZ.
ros2 launch explorer_bringup cartesian_control.launch.py simulation:=false
Caution
Ensure that the robot’s physical position matches the one displayed in RViz before making any movements. If they do not align, reinitialize the 0 position of your robot First use of your Explorer
Tip
If you don’t want to launch RVIZ and don’t show gazebo GUI, add gui:=false when launching cartesian_control
Tip
If you don’t have a 3D mouse, add spacenav:=false when launching cartesian_control
To control the robot, you can use the GUI :
or 3D mouse.
Mode 0
Connect the Explorer power supply and link it to a computer using a USB cable. In the explorer directory in the host run :
sudo ./setcan0_1M.sh
This script configures the can0 interface with a bitrate of 1 Mbps and sets the queue length to 100 packets.
In the container, launch the mode_0.launch.py file from the explorer_user_interfaces_cpp package to start the robot controller and RVIZ.
ros2 launch explorer_user_interfaces_cpp mode_0.launch.py simulation:=false
Tip
If you don’t want to launch RVIZ and don’t show gazebo GUI, add gui:=false when launching mode_0
The robot can be controlled using an Xbox One controller. Movement is handled with the left joystick, while mode switching is performed using a short or long press on the A button.
To monitor the current operating mode and its associated motion mappings, open a web browser and navigate to http://0.0.0:8080.